关键词 |
工具立体仓库,黑河立体仓库,文档立体仓库,电缆立体仓库 |
面向地区 |
全国 |
智能物流是一种的物联网技术现已广泛应用于工业上的分拣、包装、装卸 、搬运、装配等环节,随着机器人技术的快速发展,用机器人来替代人进行工作,不但可以节约人力成本和减少搬运不当对人造成的伤害,而且可以提高工作效率和质量。
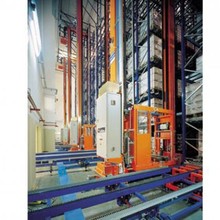
本文创新性地集成了自动化立体仓库、AGV、复合机器人及双臂机器人等智能设备,设计了一套智能机器人仓储物流系统,同时开发了总控调度软件,实现了各设备的稳定立有序运行。针对AGV定位不准确的问题,本文提出一种二维码视觉定位方法,从而提高了仓储物流系统的稳定性。

AGV经过视觉位移处理和旋转处理,可以调节AGV当前位姿,提高AGV的定位精度,AGV与其他设备的对接可靠稳定。

利用齿轮箱的模拟装配拆解工作对本文智能机器人仓储物流系统进行了应用验证。通过总控调度系统软件及各机器人系统的通讯,能够实现对齿轮箱的装配和拆解。设计开发的总控调度软件经过长期运行和反复测试,能够正确显示各设备状态,并且具有较好的用户使用界面,工作性能良好。软件运行结构如图11所示。图11a中各个按钮分别代表各机器人的不同动作,主要用于调试及单步操作。图11b 则为自动动作流程,装配模式启动后,总控调度软件就会按照的4个零件出库,然后通过平台式AGV、复合机器人、运输到双臂机器人装配台处,通过双臂机器人组装成成品放回成品料盘中, 成品料盘经复合机器人、叉车AGV运输到成品库位中,零件料盘经复合机器人、平台式AGV运输回零件库位中。