上海秩宏机电设备有限公司
 第4年
第4年

 第4年
第4年 
第4年

来源:上海秩宏机电设备有限公司 时间:2025-03-29 20:48:46 [举报]
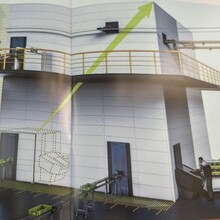
综合考虑智能机器人仓储物流系统工作流程,机器人的转弯半径、工作空间、场地等多方面约束,进行智能机器人仓储物流系统布局设计,其布局如图7所示,图中虚线表示叉车 AGV 的运行路线,粗实线表示复合机器人的运行路线,细实线为平台式AGV的运行路线,两台平台式AGV交替工作。复合机器人与叉车AGV在转接台处完成取放货,复合机器人与平台式AGV在转接处完成对接。

存储管理:包括货架库存信息、立体仓库出入库历史信息记录和事件日志信息。人机交互界面:包括信息显示、手动操作和自动操作界面。
利用齿轮箱的模拟装配拆解工作对本文智能机器人仓储物流系统进行了应用验证。通过总控调度系统软件及各机器人系统的通讯,能够实现对齿轮箱的装配和拆解。设计开发的总控调度软件经过长期运行和反复测试,能够正确显示各设备状态,并且具有较好的用户使用界面,工作性能良好。软件运行结构如图11所示。图11a中各个按钮分别代表各机器人的不同动作,主要用于调试及单步操作。图11b 则为自动动作流程,装配模式启动后,总控调度软件就会按照的4个零件出库,然后通过平台式AGV、复合机器人、运输到双臂机器人装配台处,通过双臂机器人组装成成品放回成品料盘中, 成品料盘经复合机器人、叉车AGV运输到成品库位中,零件料盘经复合机器人、平台式AGV运输回零件库位中。
标签:电子卷料立体仓库,江西立体仓库,电子卷料立体仓库,立体仓库联系方式