上海秩宏机电设备有限公司
 第4年
第4年
 第4年
第4年
第4年 
来源:上海秩宏机电设备有限公司 时间:2024-12-20 18:52:17 [举报]
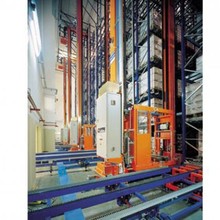
图1为本文设计的智能机器人仓储物流系统总体方案,其集成了自动化立体仓库、AGV、机器人、视觉传感器、激取光料传感器等,由机器人完成物料的拾取、摆放、搬运和分捡,视觉系统完成对物料的形状、位置和颜色识别,传感器完成移动机器人的定位和避障等,该系统实现了齿轮箱的装配和拆解工作,其适用性广,衍生能力强。设计齿轮箱装配工艺流程如图2所示。
设计开发自动化立体仓库其管理系统具有货物入库、货物出库、入/出库人工修正、库存盘点、设备状态查询及设备故障记录等功能,可以自动记录设备故障信息,包括设备编码、故障时间、故障类别、故障说明等,在故障排除后由操作员在该记录中填写排除时间信息,并且可以按照设备编码、故障类别等进行设备故障记录查询,查询结果以列表形式显示在计算机屏幕上,并可以打印输出。
双臂机器人双臂机器人采用两个7自由度柔性机械臂组成, 能够集成化与柔性化地实现快速、安全、灵活、、高 效的旋拧、定位等全套装配解决方案。该机器人系统配有视觉系统,具有视觉识别引导抓取功能,末端采用电控夹爪,实现对工件的稳定抓取。
智能机器人仓储物流系统主要由总控调度软件和立体仓库监控软件组成,立体仓库监控软件主要用于立体仓库状态反馈,以及零件/成品的存入和取出。 总控调度软件负责管理和控制所有的设备, 协调各个设备进行工作,以完成整体的传工输作控流制程。总控调度软件和其他跟各踪模块之间的关系如图5所示。
图5 软件结构图
系统中所有设备通过TCP/IP协议进行通信,如图6所示。使用路由器组建一个局域网,双臂机器人、立体仓库监控软件服务器、总控调度软件服务器通过有线的方式介入局域网,而复合机器人、平台式AGV、叉车AGV使用无线的方式介入局域网。在该局域网中,总控调度软件是整个系统的核心,允许直接监视其他设备的状态,并控制这些设备执行相应的动作。

综合考虑智能机器人仓储物流系统工作流程,机器人的转弯半径、工作空间、场地等多方面约束,进行智能机器人仓储物流系统布局设计,其布局如图7所示,图中虚线表示叉车 AGV 的运行路线,粗实线表示复合机器人的运行路线,细实线为平台式AGV的运行路线,两台平台式AGV交替工作。复合机器人与叉车AGV在转接台处完成取放货,复合机器人与平台式AGV在转接处完成对接。

存储管理:包括货架库存信息、立体仓库出入库历史信息记录和事件日志信息。人机交互界面:包括信息显示、手动操作和自动操作界面。
标签:电缆立体仓库,高雄立体仓库,电子产品立体仓库,立体仓库联系方式