上海秩宏机电设备有限公司
 第4年
第4年
 第4年
第4年
第4年 
来源:上海秩宏机电设备有限公司 时间:2025-01-20 20:07:15 [举报]
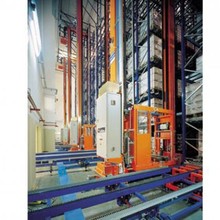
图1为本文设计的智能机器人仓储物流系统总体方案,其集成了自动化立体仓库、AGV、机器人、视觉传感器、激取光料传感器等,由机器人完成物料的拾取、摆放、搬运和分捡,视觉系统完成对物料的形状、位置和颜色识别,传感器完成移动机器人的定位和避障等,该系统实现了齿轮箱的装配和拆解工作,其适用性广,衍生能力强。设计齿轮箱装配工艺流程如图2所示。
平台式 AGV
平台式AGV能够实现物品的自动化可靠运输及自动投送。其搭载激光传感器、超声波传感器。基于激光SLAM的定位导航算法,结合超声波传感器,实现自主行走及自主避障。其控制台可以集中调度、监控、管理 AGV 系统的运行状态活动。

叉车 AGV叉车AGV具有激光导引系统、控制台和调度管理系统、在线自动充电系统、通讯系统及安全系统等。控制台和调度管理系统是AGV系统的调度管理中心,负责与上位机交换信息,生成AGV的运行任务,并将指令下发给AGV完成相应的任务。
存储管理:包括货架库存信息、立体仓库出入库历史信息记录和事件日志信息。人机交互界面:包括信息显示、手动操作和自动操作界面。
为了凸显二维码的轮廓,本文采用在原二维码基础上加入矩形外轮廓,中心与二维码中心重合,如图8所示。使用加入矩形外轮廓的二维码检测效果好,不易被误检测,可以显著提高边缘检测的正确识别率。
利用齿轮箱的模拟装配拆解工作对本文智能机器人仓储物流系统进行了应用验证。通过总控调度系统软件及各机器人系统的通讯,能够实现对齿轮箱的装配和拆解。设计开发的总控调度软件经过长期运行和反复测试,能够正确显示各设备状态,并且具有较好的用户使用界面,工作性能良好。软件运行结构如图11所示。图11a中各个按钮分别代表各机器人的不同动作,主要用于调试及单步操作。图11b 则为自动动作流程,装配模式启动后,总控调度软件就会按照的4个零件出库,然后通过平台式AGV、复合机器人、运输到双臂机器人装配台处,通过双臂机器人组装成成品放回成品料盘中, 成品料盘经复合机器人、叉车AGV运输到成品库位中,零件料盘经复合机器人、平台式AGV运输回零件库位中。
标签:工具立体仓库,金华立体仓库,电子卷料立体仓库,各类半成品立体仓库