
上海秩宏机电设备有限公司
高级VIP
联系人:陈先生
手机:13564028735
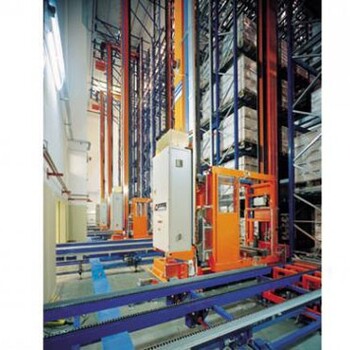
抚州电缆立体仓库
来源:上海秩宏机电设备有限公司
发布时间:2025-01-29 20:14:07
复合机器人复合机器人由移动底盘及关节柔性机械臂组成。其整体融入视觉系统、多样化的导航配置、的二次视觉定位等技术,使机器人精度更高、更加智能化。可以广泛应用于3C行业、自动化工厂、仓储分拣、自动化货物超市等,实现物料自动搬运、物品上下料、物料分拣等。
为了凸显二维码的轮廓,本文采用在原二维码基础上加入矩形外轮廓,中心与二维码中心重合,如图8所示。使用加入矩形外轮廓的二维码检测效果好,不易被误检测,可以显著提高边缘检测的正确识别率。
旋转处理模型
旋转处理即以中心点为旋转参考点,旋转修正,如图10a所示。设定P0(x0 ,y0) 为轮廓中心点坐标,B(x23 ,y23)为待修正后矩形一边的中心点坐标, A(x'23,y'23)为修正后矩形一边的中心点坐标。根据P0和B点坐标求得A点坐标,如式(3):
标签:电缆立体仓库,抚州立体仓库,各类半成品立体仓库,电子产品立体仓库
最新产品
更多




热门信息
上海秩宏机电设备有限公司 > 供应信息 > 抚州电缆立体仓库